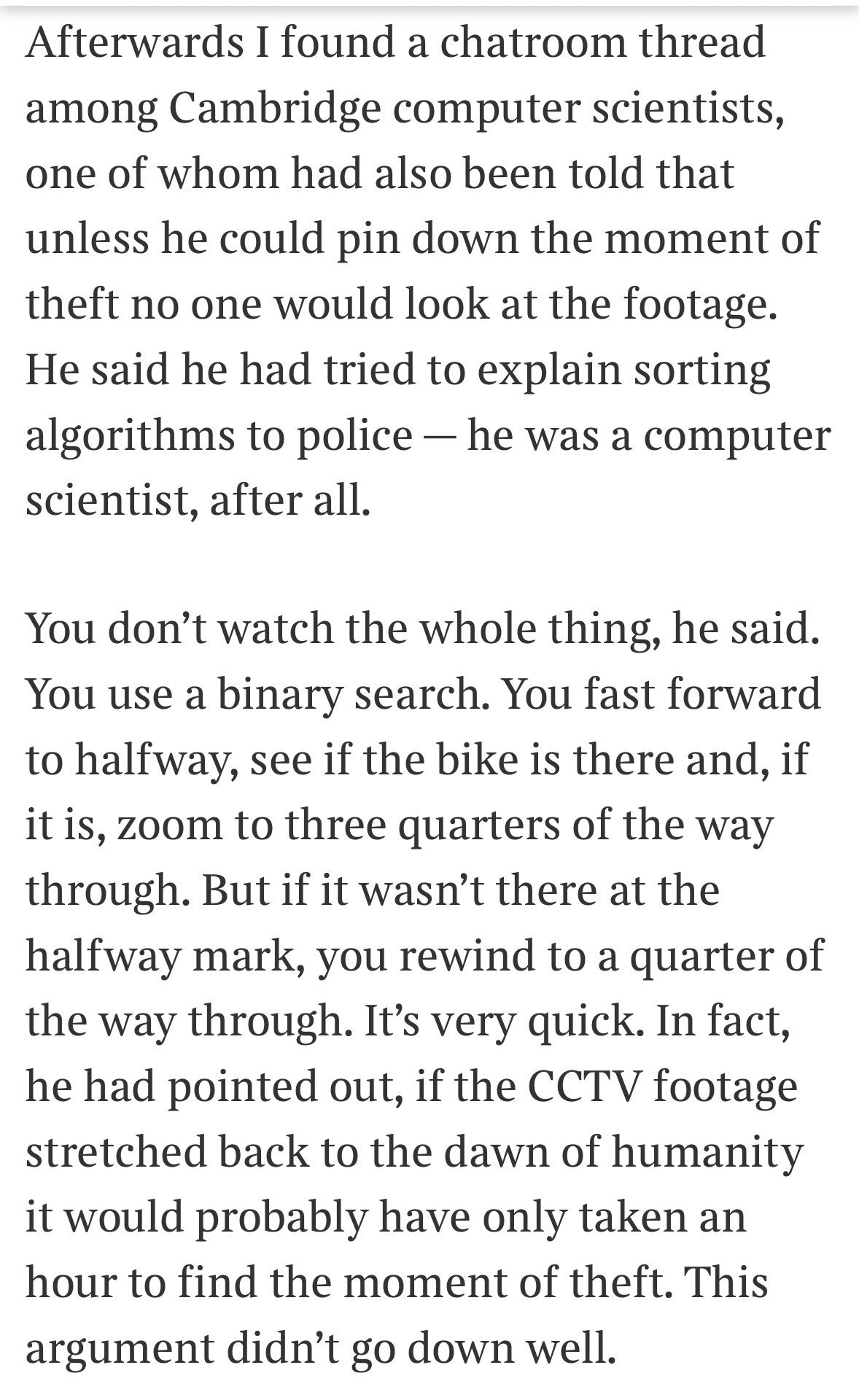
Binary search only works on sorted data, i.e. you know which side of the mid point is pointing towards the incident. If the incident leaves no trail, you can’t know whether you can discard the left side or the right side, making it a complicated linear search at that moment.
If the incident leaves no trail, you can’t know whether you can discard the left side or the right side
There’s a moment where the bike is there, then another when its not. The whole video, either way, will either from the beginning up to the point of theft have the bike there, or NOT have the bike there from the point of theft to the end of the video. The marker is the removal of the bike from the video lens.


{kind=link}
Binary search only works on sorted data, i.e. you know which side of the mid point is pointing towards the incident. If the incident leaves no trail, you can’t know whether you can discard the left side or the right side, making it a complicated linear search at that moment.
There’s a moment where the bike is there, then another when its not. The whole video, either way, will either from the beginning up to the point of theft have the bike there, or NOT have the bike there from the point of theft to the end of the video. The marker is the removal of the bike from the video lens.